






































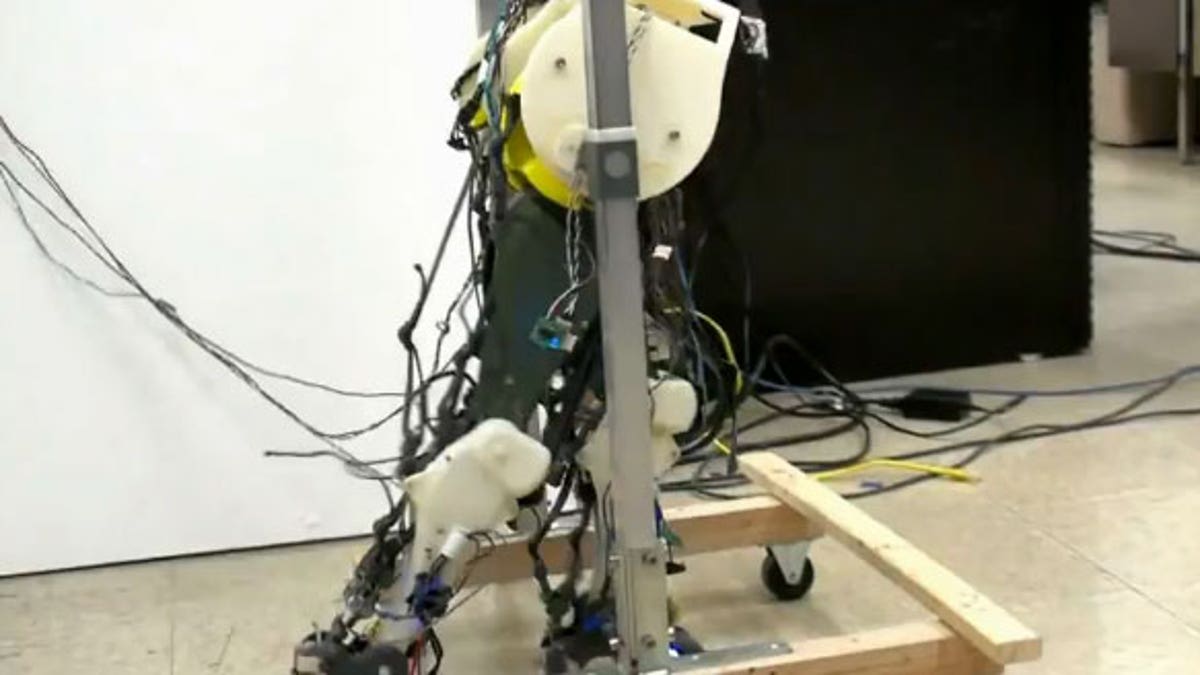
(Courtesy Journal of Neural Engineering)
The first pair of biologically accurate robot legs can walk like clumsy human babies placed on a treadmill — placing one foot in front of the other with surprising confidence.
The robot legs work despite having just a simple nervous system to control the hips. That is because the lower legs' reflex responses take over to complete the walking motion — a possible explanation for how human babies can walk on treadmills without an adult's complete sense of coordination and balance.
"Interestingly, we were able to produce a walking gait, without balance, which mimicked human walking with only a simple half-centre controlling the hips and a set of reflex responses controlling the lower limb," said Theresa Klein, a Ph.D. student at the University of Arizona.
That "half-centre" represents a neural network in the human spinal cord that can send out muscle signals. The simplest neural network, the half-centre, fires off alternating signals to create the rhythm of walking.
Past walking robots have never tried including that nervous system feedback and the biological reflexes available to humans. The University of Arizona researchers built their robot with a neural controller — the half-centre — and leg sensors that are able to detect the weight of each step and report back to the neural controller.
The weight sensors join together with the robot's Kevlar straps that mimic leg muscles — another fairly unique aspect of the walking robot. Mechanical control comes from four motors in the hip segment, three motors in the thigh and just one motor in the calf.
Such baby steps for robot walking could lead to better understanding of how human babies and patients with spinal cord injuries learn to walk. But they could also improve bipedal humanoid robots that the U.S. military wants on tomorrow's battlefields, or that rescue workers could deploy in disaster zones.
The research is detailed in the July 6 issue of the Journal of Neural Engineering.