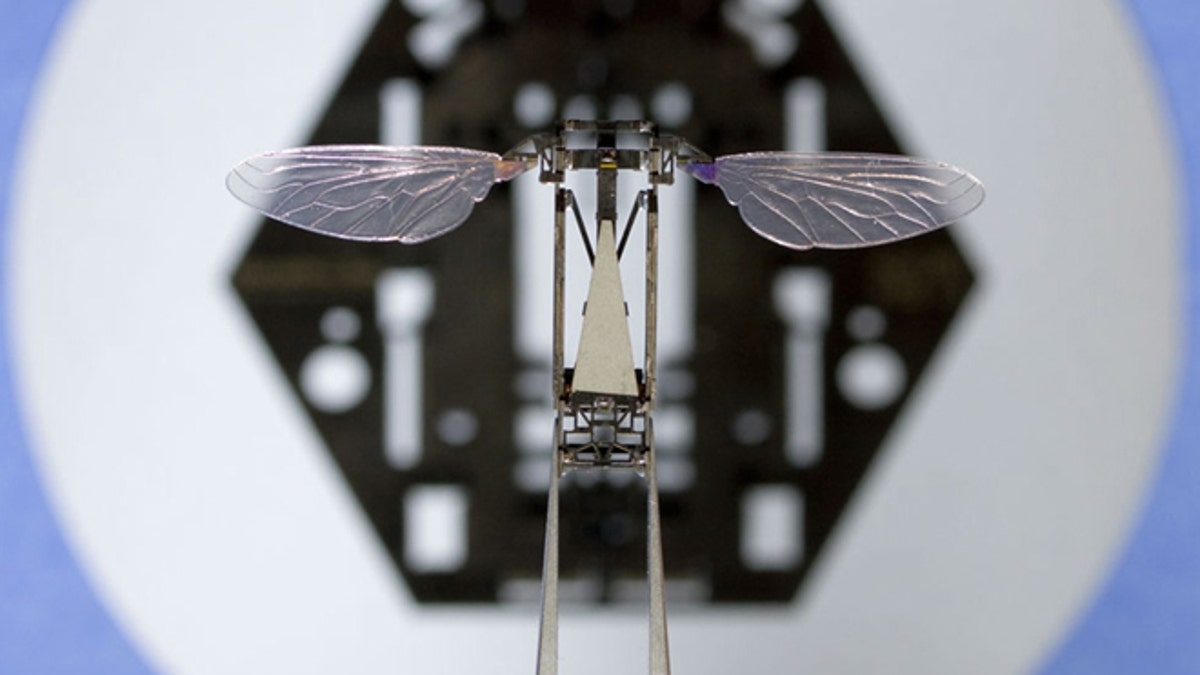
Researchers have figured out how to make robotic bees using origami techniques that fold carbon and other materials together like a pop-up children's book. (Harvard Microrobotics Laboratory)
Researchers have figured out how to make robotic bees using origami techniques that fold carbon and other materials together like a pop-up children's book.
This new method will make it faster and cheaper to mass produce these tiny flying robots, perhaps allowing swarms of them to one day pollinate crops, investigate chemical spills or search for missing hikers.
"The robots themselves are an interesting goal," said Rob Wood, professor of electrical engineering at Harvard University. "But what gets us excited are the open scientific questions that we have to look into in the course of the research and the engineering challenges to get these things to work."
PHOTOS: Extraordinary Beauty of the NanoArt World
Wood and colleagues at Harvard are publishing their findings in the March issue of the Journal of Micromechanics and Microengineering.
Wood and his team have been working with micro-bees the size of a quarter for several years. The problem has been that each one has to be made individually. So Wood challenged his grad students to come up with a solution using layers of material that could be folded.
[summary]
The team put together 18 layers of carbon fiber, Kapton (a plastic film), titanium, brass, ceramic, and adhesive sheets in a complex, laser-cut design. It uses tiny foldable tabs that allow the three-dimensional device, which is 2.4 millimeters tall, to be assembled in one movement.
"Previously we would take individual components and make them in a related way by hand," Wood said. "The final step is by which we can imagine a linkage mechanism. You cut a tab and get one degree of freedom. It's similar to a children's pop-up book, then you lock that piece into place."
NEWS: How To Make Nano-Origami
Wood says the same technique could be used for high-power switching, optical systems, and other tightly integrated electro-mechanical devices. The goal is to have automated devices building these tiny flying micro-craft: robots building robots.
Another expert says the Harvard team's finding will help make micro-insects to be built much more solidly, without wiggling joints and friction that can sap energy from the entire system. At small scales, any extra amount of friction can make it difficult for the robot to get off the ground, according to Sean Humbert, professor of aeronautical engineering at the University of Maryland.
"If you have joints and mechanisms that have a lot of play in them and aren't assembled properly, the energy to drive the robot goes up significantly," Humbert said. "With very small robots, the size weight and power constraints are so great that you are lucky to get a battery in there, and maybe a processor. That's why this technique is important. With the pop-up stuff, you can build it more precisely and repeatedly."
Wood says there are plenty of other challenges to work on, such as a power system, before micro-swarms are ready for prime-time. Right now, all his micro-bees are on tethers.
"Flight at a small scale is energetically expensive," he said.

Get a daily look at what’s developing in science and technology throughout the world.