




































File photo: Robots assemble a Toyota Motor Corp. Yaris at the company's plant in Onnaing, near Valenciennes, France, May 17, 2017. (REUTERS/Benoit Tessier)
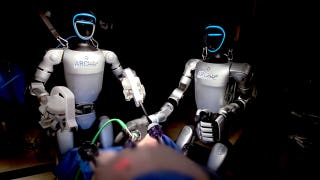
Researchers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) are developing robots that can teach each other learned skills.
Dubbed C-LEARN, (the ‘C’ stands for ‘constraints’) the program sought to solve issues faced in how robots learn. Traditionally, robots usually either copy an observed task or by following commands using motion-plan techniques, such as optimization, according to Digital Trends.
These methods, however, come with setbacks.
Robots that learn by demonstration aren’t able to transfer the skills they’ve learned to one another. Motion planning systems robots are accurate, but they require hand coding, which is often time-consuming.
The C-LEARN solution gives non-coders the ability to teach robots various tasks using information about manipulating objects in a single demonstration. These skills can then be passed along to other robots that move in different ways.
THESE ROBOTS CAN TALK TO ONE ANOTHER TO 'SEE' AROUND FACTORY CORNERS
The process starts with a user giving a robot information for reaching and grasping objects with different constraints. “For example, a tire and a steering wheel have similar shapes, but to attach them to a car, the robot has to configure its arms differently to move them. The knowledge base contains the information needed for the robot to do that,” MIT wrote on its website.
From there the operator shows the robot a single demonstration of a specific task with a 3-D interface that uses a sequence of moments known as “keyframes.” Matching the keyframes to different situations in the knowledge base, allows the robot to “suggest motion plans for the operator to approve or edit as needed,” wrote MIT.
One challenge the team faced came after the robots learned their constraints from demonstrations. They were found to be unable to manipulate objects with precision. The team fixed the dilemma by designing constraints using computer-aided design (CAD) programs. These programs told the robot if its hands should be parallel or perpendicular in order interact with a particular object.
THIS CONSTRUCTION ROBOT CAN LAY BRICKS 6 TIMES FASTER THAN YOU
Researchers tested their new system out on Optimus, a two-armed robot used in bomb disposal. Optimus was programmed to open doors, transport objects and to extract objects from containers. Once the systems were in place, Optimus successfully transferred the learned skills to Atlas, a 6-foot-tall 400 lb. humanoid robot.
MIT found that the robot was able to excel with it collaborated with humans. Despite an 87.5 percent success rate on its own, the robot succeeded 100 percent of the time with an operator, “that could correct minor errors related to the robot’s occasional inaccurate sensor measurements,” wrote MIT.
The inspiration behind the project was the team’s desire to make robots more useful and user friendly for people.
“Very precise manipulation is difficult to do. In manufacturing, for example, traditional robots must be carefully programmed for each specific task,” wrote MIT CSAIL Ph.D. student, Claudia Perez-D'Arpino in an email to Fox News. “In emergency scenarios like bomb disposal, the best technology currently available in the field is ‘joint-by-joint teleoperation,’ which means that a human expert is essentially puppeting the robot at a high level of detail.”
A paper describing C-LEARN was accepted to the IEEE International Conference on Robotics and Automation (ICRA), which takes place May 29 to June 3 in Singapore, according to MIT.