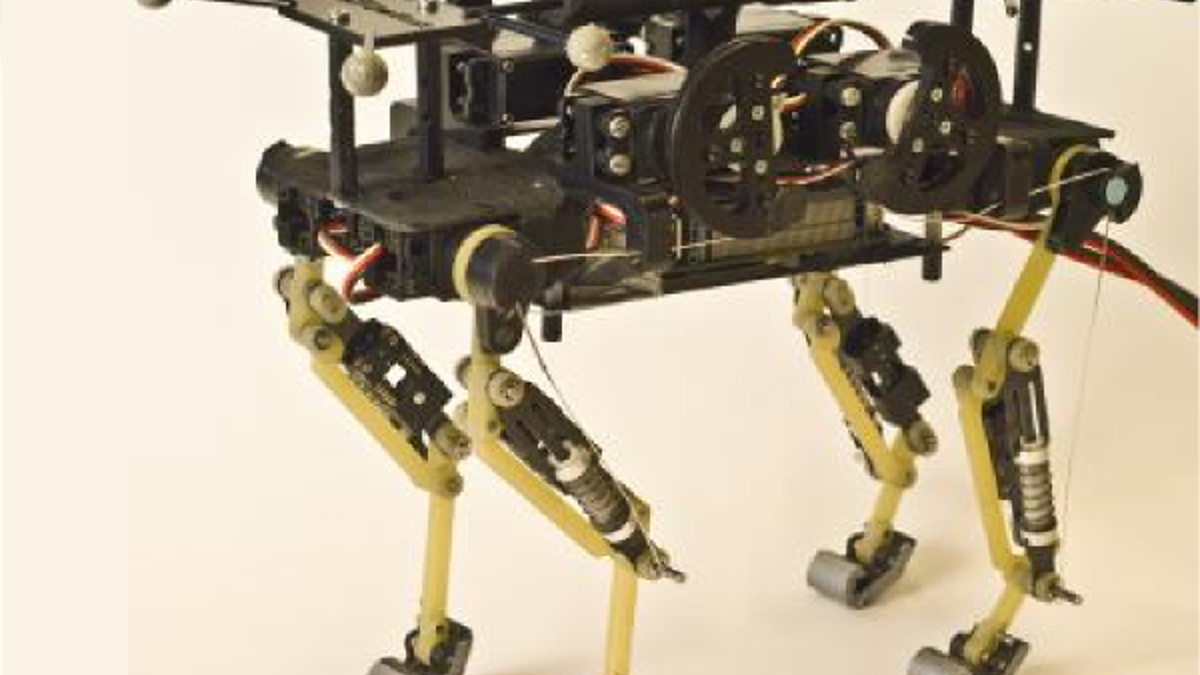
This is Cheetah-cub, a robust quadruped robot. (EPFL)
Move aside, Grumpy Cat. This is the coolest cat you'll see on the Internet today.
Researchers at the Ecole Polytechnique Fédérale de Lausanne have built a robot modeled after the anatomy of several small cats, including a housecat and a cheetah cub. By observing the robot and adjusting its features, the scientists hope to learn more about feline locomotion and how to develop faster and more powerful robots, able to achieve speeds of 1.4 meters per second.
The robot, called Cheetah-cub, has almost part-for-part mechanical reproductions of feline legs. Each leg has three segments proportional to those of a real cat, with springs instead of tendons and small motors instead of muscles.
This structure gives Cheetah-cub excellent speed as well as balance; the robot is able to sprint, meaning that at certain points in its gait, all four feet are off the ground. With a top speed of around 1.4 meters per second, Cheetah-cub is the fastest robot to date among quadruped robots weighing less than 66 pounds.
Cheetah-cub does differ from a real feline in one significant way — it doesn't have a head. That's because the robot just doesn't need one.
The robot was intentionally designed without exterior sensors, or the equivalent of eyes, ears and whiskers. That means Cheetah-cub doesn't scan the environment before running across it; instead, the robot relies entirely on its structure and its internal sensors to stay balanced.
EPFL scientist Alexander Sprowitz explained that this ability to "run blind," in a sense, is similar to the way certain infant animals, such as wildebeests, are able to walk within an hour after their births. This is possible, scientists believe, because these animals' anatomies are optimized for balance.
That the robot doesn't need external sensors also highlights the strength of its design and illustrates the way felines' bodies have evolved for superior balance and agility, Sprowitz told TechNewsDaily.
The headless construction means it's easy to adapt Cheetah-cub's design by adding extra sensors or equipment in the head area. For example, if the EPFL researchers decide to add exterior sensors, such as a scanner to detect uneven ground, they will design the hardware to fit into a head-like structure.
The researchers have yet to publish Cheetah-cub's blueprints, but Sprowitz saidthat the robot is actually fairly easy to make. It was constructed from commercially available and largely inexpensive materials, and Sprowitz says that anyone with the skill to make a model airplane could construct a Cheetah-cub.
And Cheetah-cub will appeal to more than just robot enthusiasts; it also has something to offer wildlife researchers. By studying the way the robot moves, scientists will learn more about real-life cheetah cubs and other felines.
Other methods of investigating animal biomechanics, which is the study of biological structures and their functions, involve outfitting animals with motion-capture suits or getting them to run across pressure plates. Still other techniques involve surgically implanting sensors. None of these methods are ideal, either for the researchers or the animals. [See also: E3: 'Call of Duty: Ghosts' Puts a Dog Front and Center]
The EPFL researchers have previously built a robotic salamander and a lamprey eel. This time, the team chose a cat as the model for several reasons. One, they were interested in studying high-speed quadrupeds. But, two, they needed a design small enough to be easily manageable in the lab.
Dogs were dismissed because their physiques have been significantly altered by domestication, resulting in many different breeds with widely varied anatomical design. Cats are less diversified as a species, so it's easier to make a robotic blueprint of their physique.

Get a daily look at what’s developing in science and technology throughout the world.